华盛顿大学的科学家们创造出了一种小型机器人装置,它们能够在下落时采用折叠姿势来调整自己的空中运动。这些 "微型飞行器 "从无人机中释放出来时,会采用一种特殊的折纸技术--三浦折叠,从分散的翻滚运动过渡到直接向下坠落。研究人员利用内置压力传感器(用于近似高度)、定时器或蓝牙信号等各种方法,为每只滑翔机管理精确的过渡时刻。
这些微型飞行器重约 400 毫克,约为一枚标准钉子重量的一半,在风力不大的情况下,从约 40 米的高度释放时,可覆盖一个足球场的长度。它们配备了一个无需电池的机械装置、一个电力收集电路和一个控制装置,用于启动飞行中的形状修改。此外,它们还可以安装传感器,在飞行过程中测量温度和湿度等参数。这些机器人解决了许多复杂的设计问题:
- 具有足够的刚度,防止过早过渡到折叠状态。
- 在不同配置之间迅速切换。内置机制仅需 25 毫秒即可启动折叠过程。
- 无需连接外部电源即可调整结构,因为它们的太阳能电路可从太阳光中获取动力。
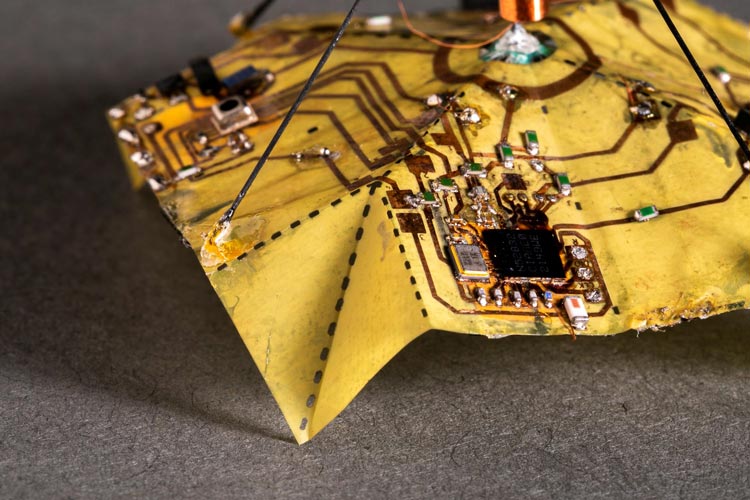
电路是直接在构成微型荧光粉的柔性材料上组装和图案化的。到目前为止,这些微型飞行器只能在一个方向上改变自己的形状--从散射运动到直接下落。这种改变可以使多个滑翔器同时受控下降,确保它们在下降过程中向不同方向散开。不过,研究小组预计未来的版本将实现两个方向的转换,从而提高着陆时的准确性,尤其是在风力不可预测的情况下。